Digital Prosthetic for Paragolfer
I'd like to thank Dr. Iian Black for mentoring me throughout this
project and my close friend, Chris Macartney for always encouraging me
to push myself to do better and take every advantage to learn and grow as an engineer.
The development of bionic prosthetics is what originally got me into the field of biomedical engineering, and was what I had devoted a great deal of my pursuit of knowledge to throughout my time as an undergrad at Cal Poly. At this point in my academic career I had developed several purely mechanical prosthetic devices for some users but yearned to design and iterate upon a full bio-mechatronic system.
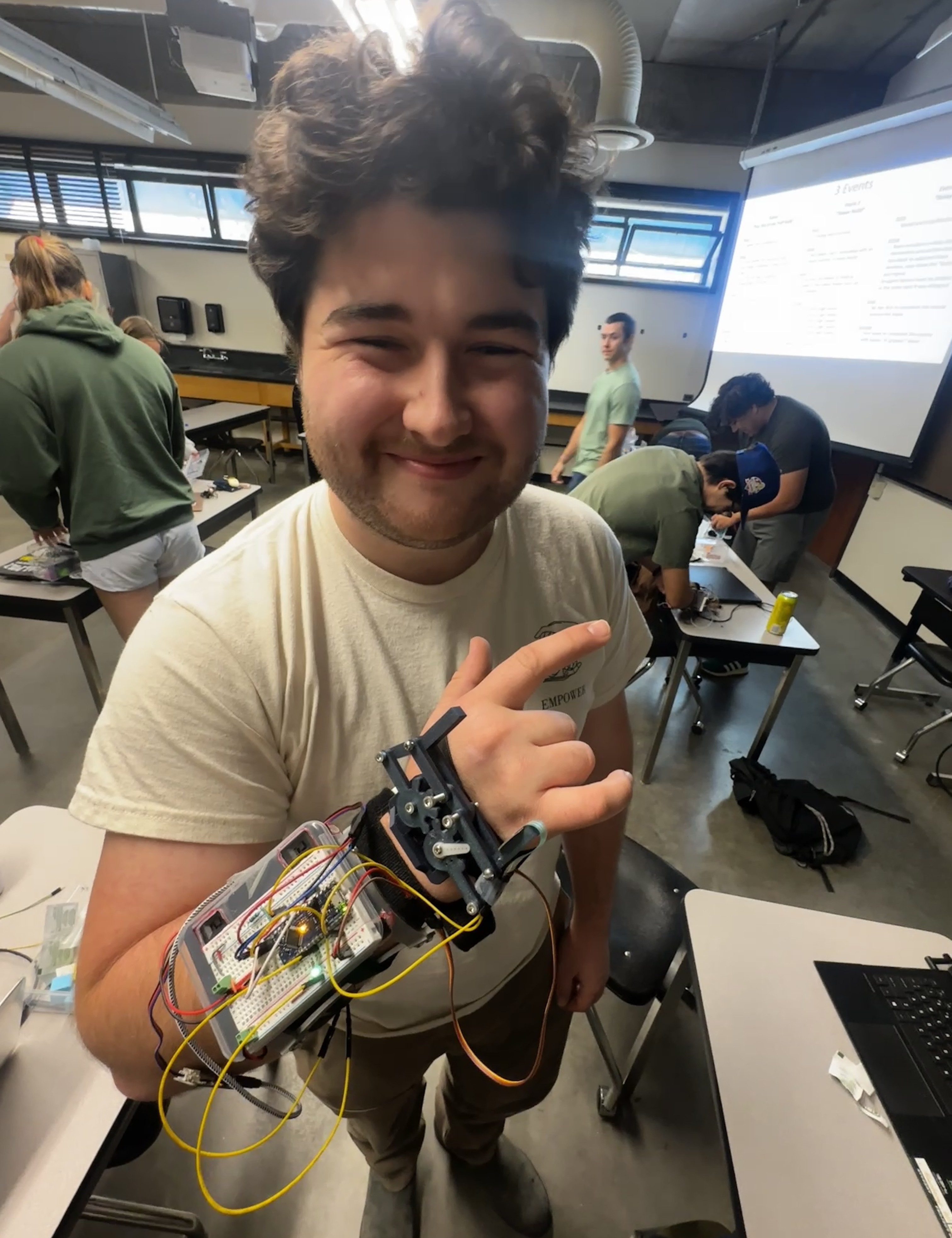
The Robot Enhanced Arm for Comprehensive Healing [R.E.A.C.H.] Project aimed to develop a low-cost prototype of a mechatronic gripper that had all of the foundational pillars that leading bionic prosthetics like the Ability Hand [PSYONIC], COVVI Hand [COVVI], and TASKA Hand [TASKA] all have. The aforementioned pillars consist of the following: 1. EMG-Based User-Control; 2. A standalone Circuit System that can be easily housed within a user's socket; 3. Multi-modal Control Schemes; 4. FSR-Driven Haptic Feecback.
If you would like to review the full techinal report detailing all design aspects of this project, please click here!